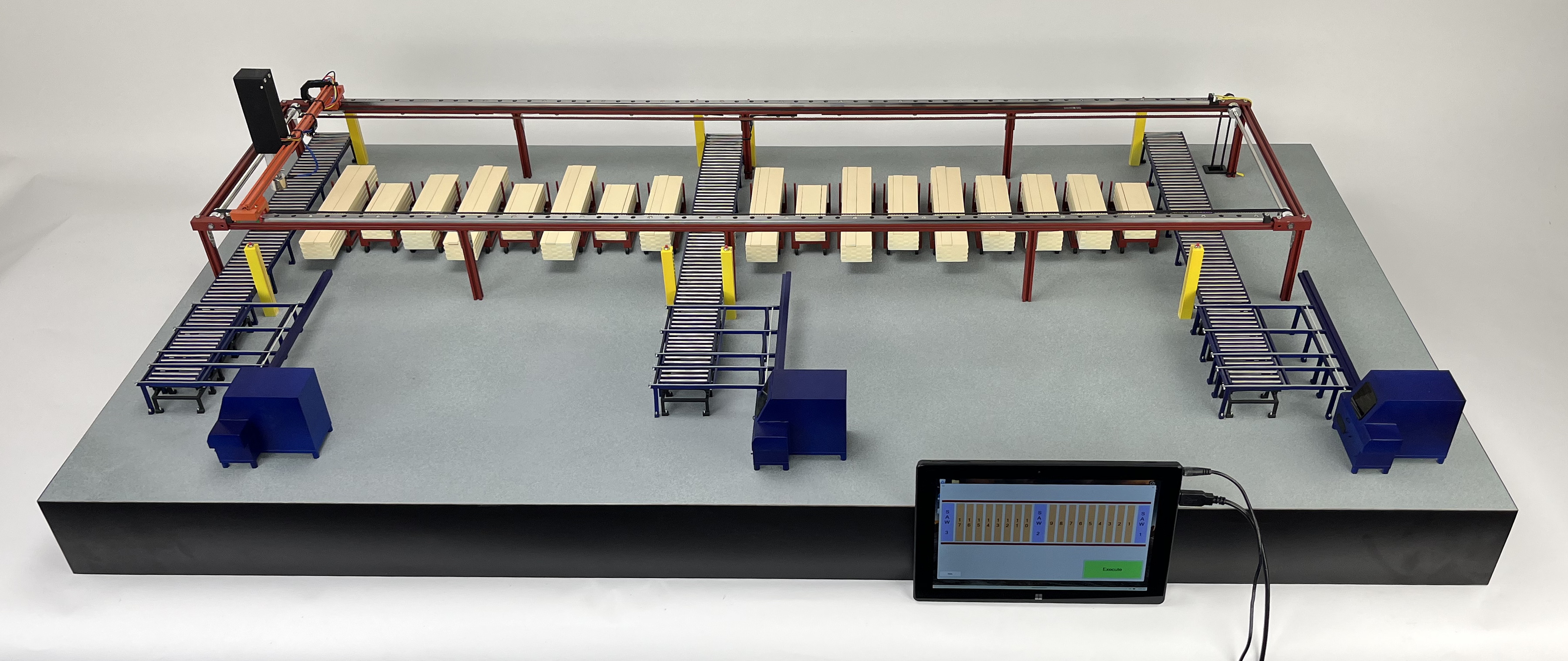


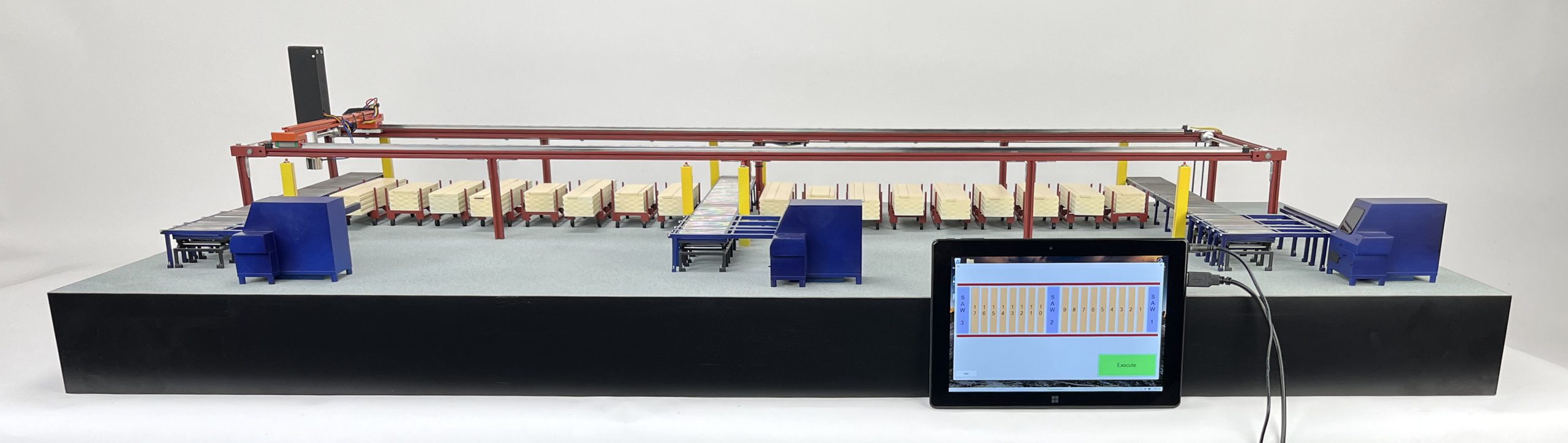
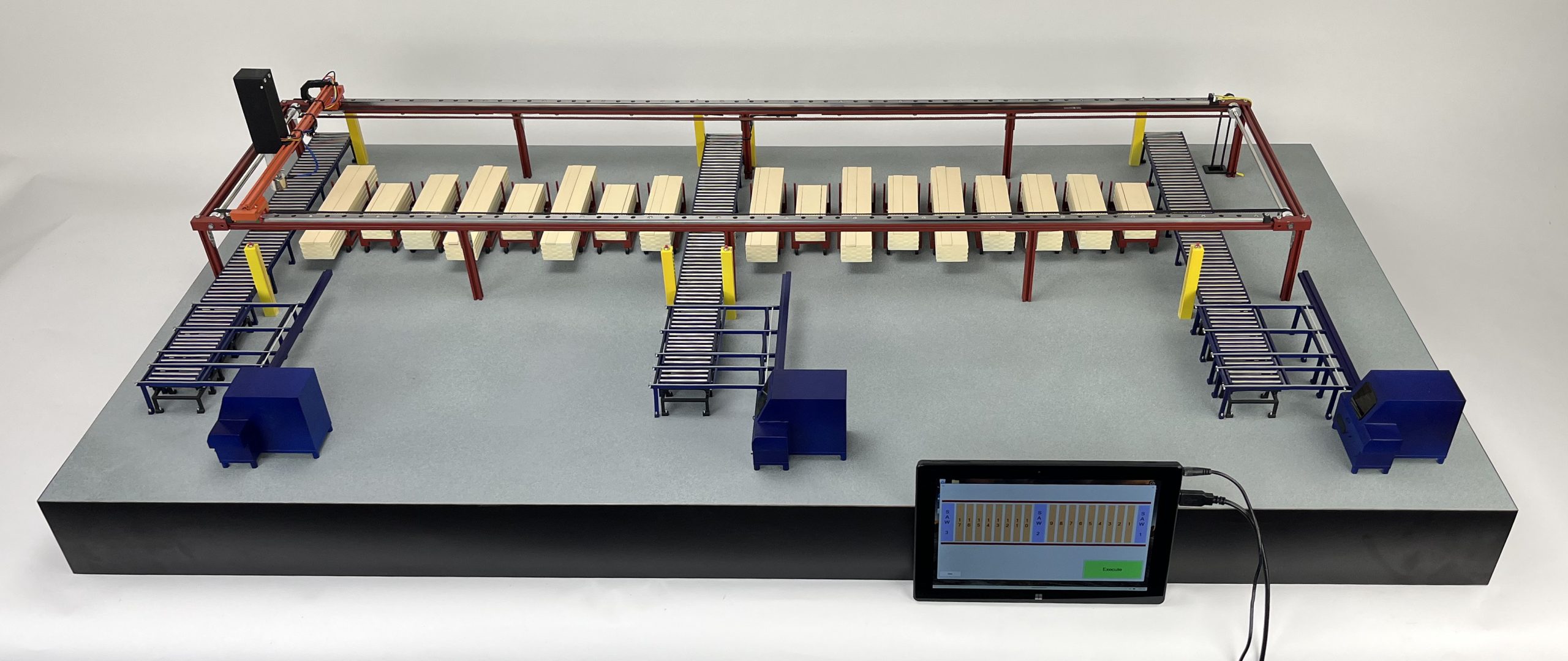
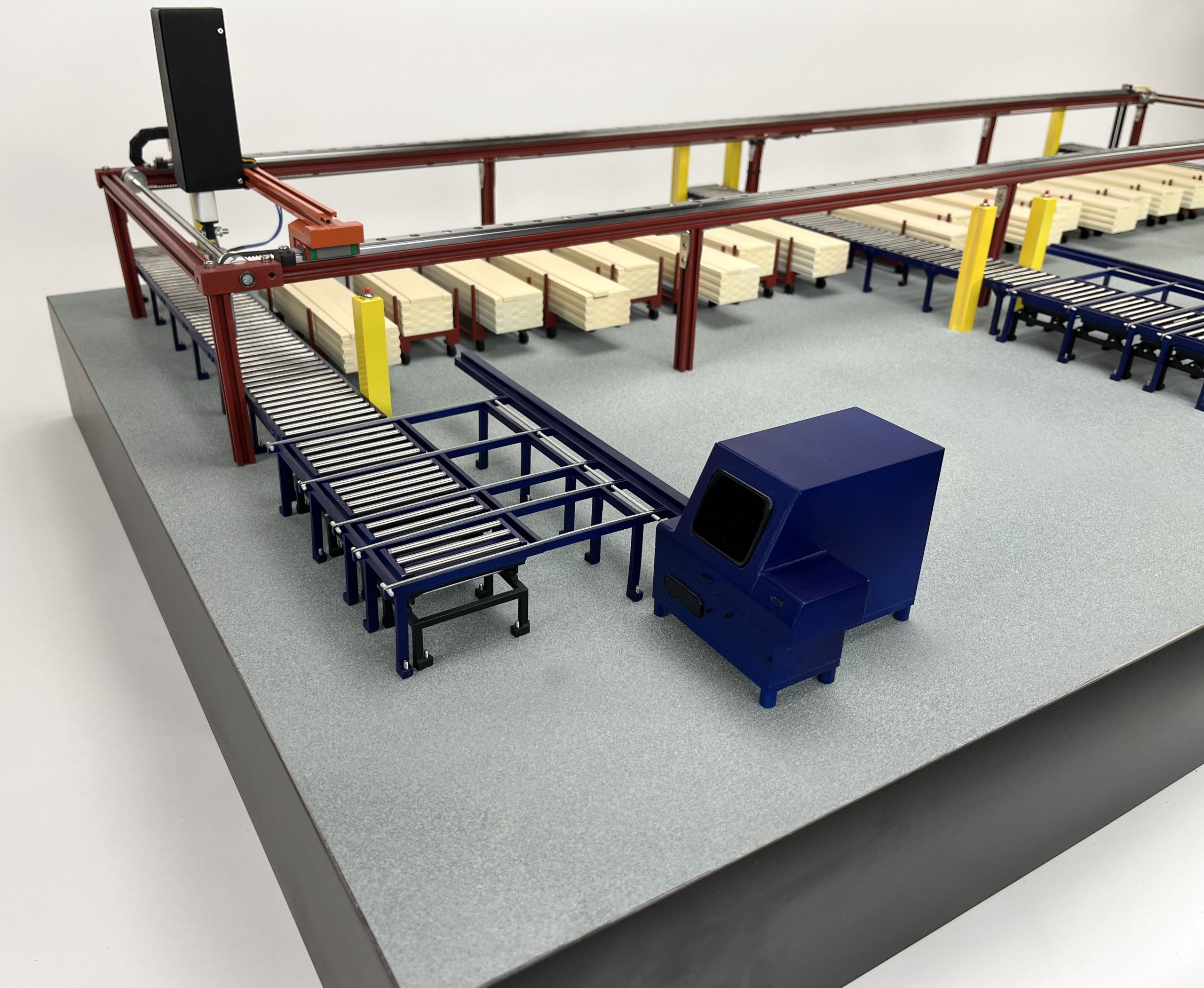
Automated Wood Retrieving Robot
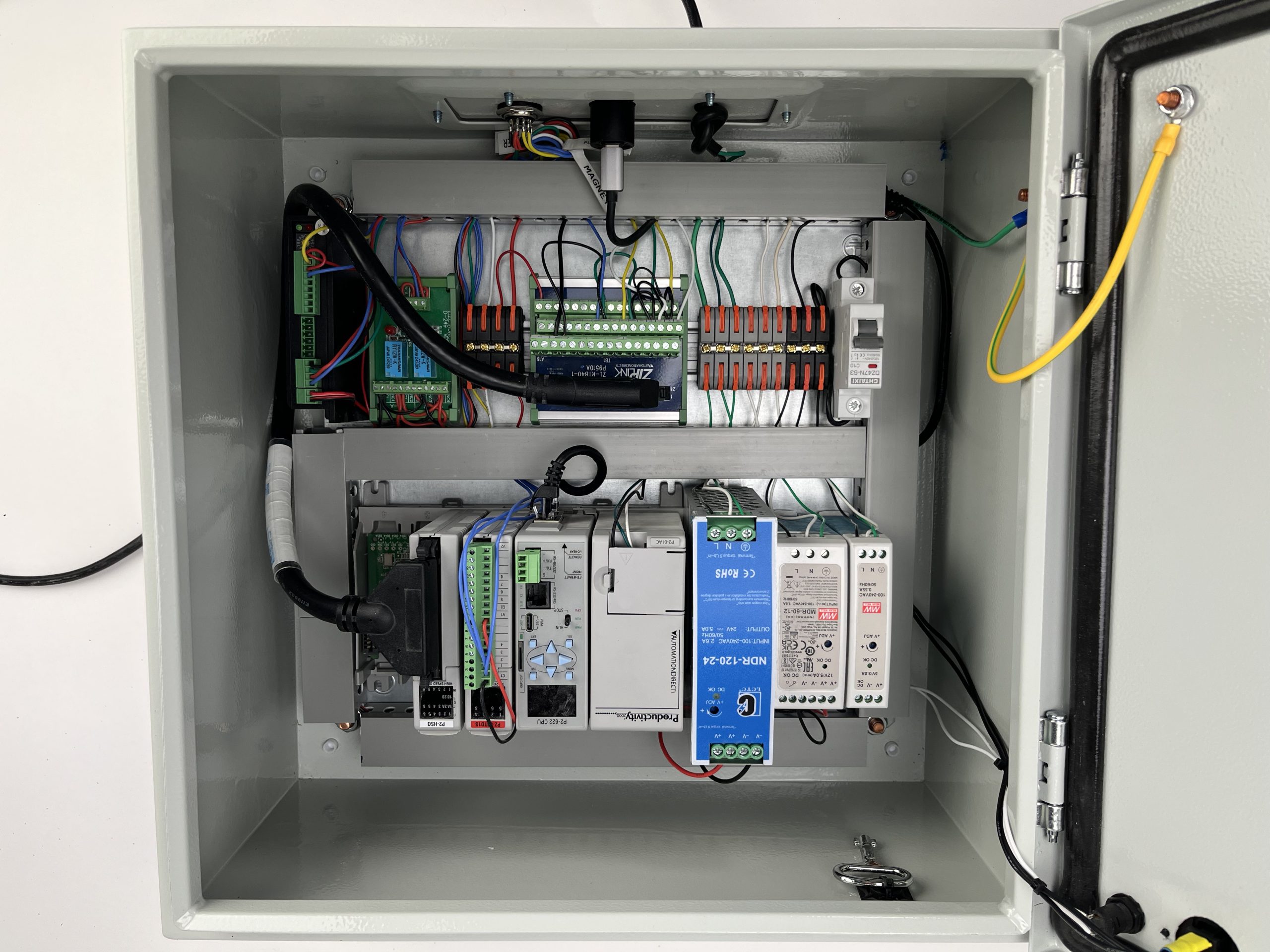
Our customer uses a PLC to control their product and asked us to make a model that was controlled by a PLC using ladder logic so that they could edit the code later to add different demo modes.
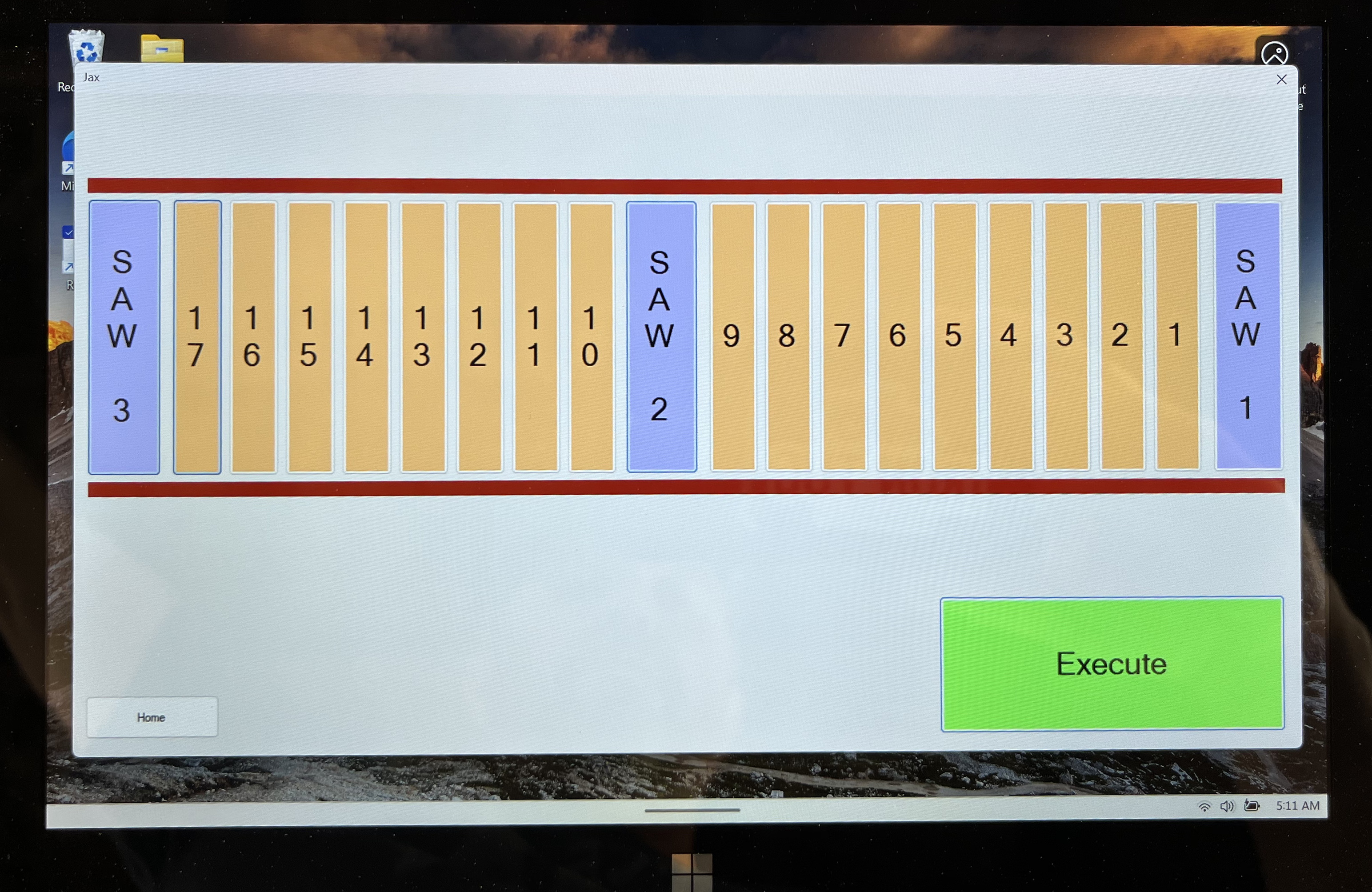
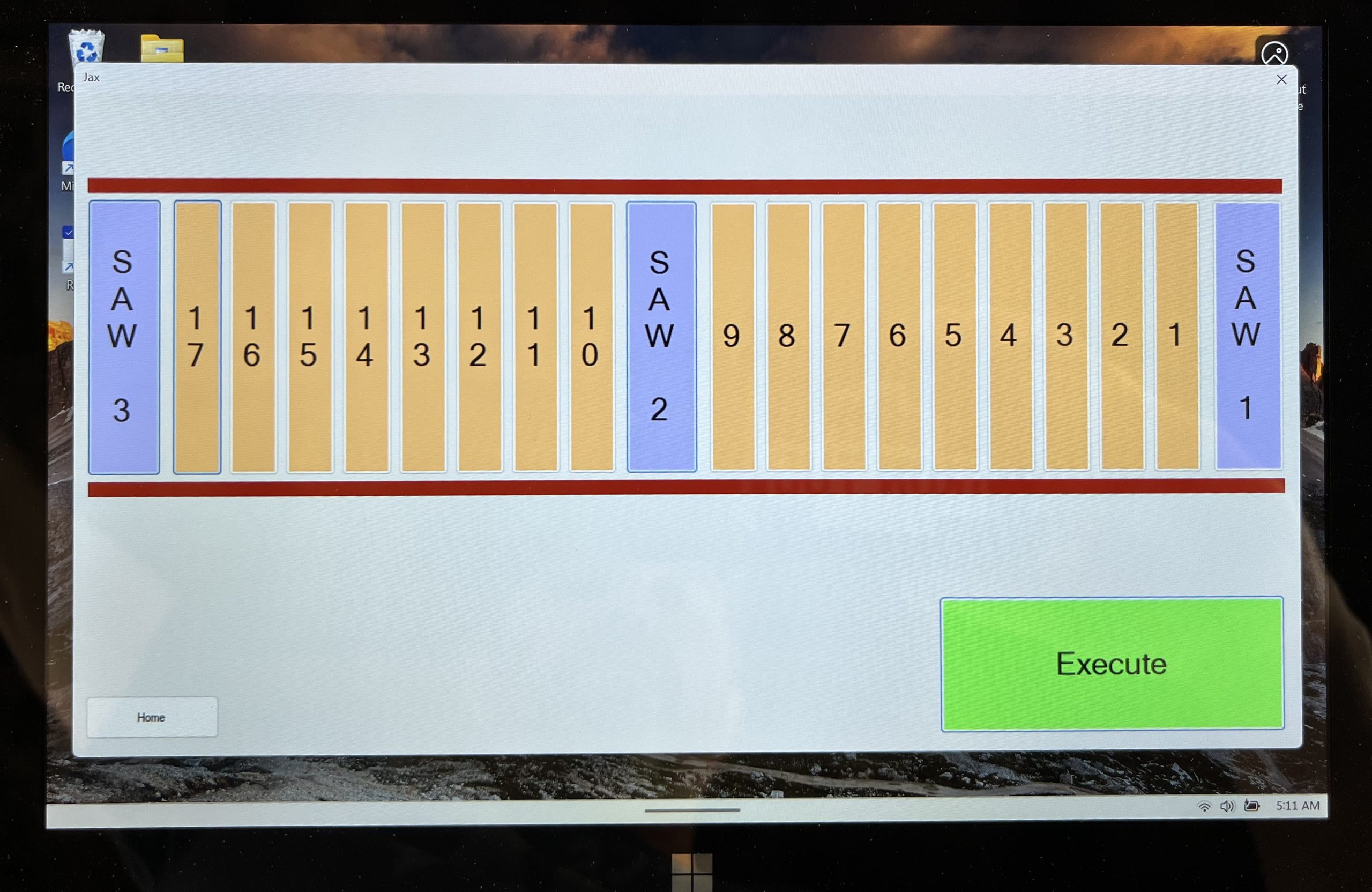
Additionally, KiwiMill wrote a custom tablet controller that interfaced with the PLC allowing sales staff to pick a bin and saw outfeed location and let the model execute the task of picking up the stack of wood and dropping it off at the designated saw.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}